探讨了螺旋桨无人机动力系统的相关理论,并开发手机与电脑版程序解决相关问题。下载地址在文末。
上一篇文章我们讲了螺旋桨无人机动力系统相关的理论,这篇文章说说程序的设计。
数据来源
所有的数据都来自于APC官网的数据。由于APC螺旋桨高效率的优点(正品APC桨的效率非常高,接近0.9),以及APC在其官网公布了所有型号的理论性能数据文件,故下载所有其官网上的五百个左右性能数据文件,其文件已经存储为固定的格式。先在官网上下载索引文件PER2_TITLEDAT.txt,再用wget批量将所有的螺旋桨性能数据文件下载下来。一共五百来个文件,中间下载是否有连接错误导致文件没有下载完整我也不知道![]() 。APC的桨型号很齐全,基本覆盖了航模级别常用的尺寸,从几英寸到26英寸的都有,如果在这些型号以外的型号那就没办法了。。。数据全部都是dat格式的,用std::ifstream读文件非常耗时。对于开发的安卓版本,肯定不会用External folder里面包含所有的数据,只能用Qt资源文件+QDataStream来读写(不支持std::ifstream),这样速度更快,不过缺点在于如果数据变动、扩展会不太方便。在写完所有程序之后,我还把所有数据迁移到了一个sqlite数据库文件中,并加上索引,访问速度大大提升,不过目前是不想重构sqlite的版本了。
。APC的桨型号很齐全,基本覆盖了航模级别常用的尺寸,从几英寸到26英寸的都有,如果在这些型号以外的型号那就没办法了。。。数据全部都是dat格式的,用std::ifstream读文件非常耗时。对于开发的安卓版本,肯定不会用External folder里面包含所有的数据,只能用Qt资源文件+QDataStream来读写(不支持std::ifstream),这样速度更快,不过缺点在于如果数据变动、扩展会不太方便。在写完所有程序之后,我还把所有数据迁移到了一个sqlite数据库文件中,并加上索引,访问速度大大提升,不过目前是不想重构sqlite的版本了。
功能介绍
程序分为PC版和移动(安卓)版,主要以介绍PC版为主。PC版共有两个程序:DemoProp,用于计算无刷电机动力系统的工作状况并给出一定的建议;PropChart,用于计算电动和油动动力系统的工作状况并绘制图表。
筛选功能
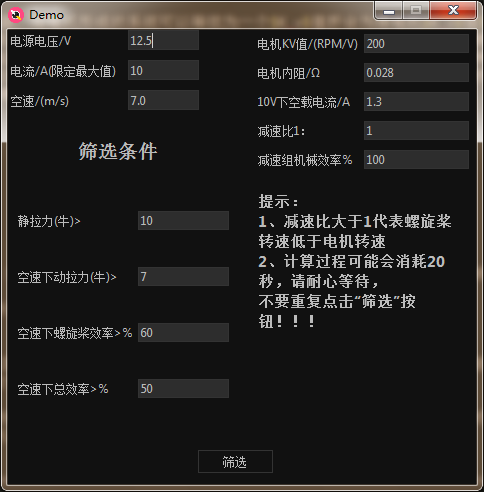
程序可以对给定的工作状况下的符合要求(如拉力、效率等条件)的螺旋桨进行筛选。DemoProp的筛选界面如下图所示,可以输入电机、电源、减速组等相关信息。
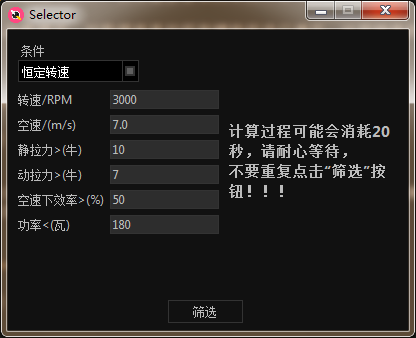
 PropChart的筛选界面如下图所示,这里运用的模型是给定转速或者给定输入功率,这样就既能够用于求解电动系统的工作状况,也适用于求解油动系统的工作状况。
PropChart的筛选界面如下图所示,这里运用的模型是给定转速或者给定输入功率,这样就既能够用于求解电动系统的工作状况,也适用于求解油动系统的工作状况。
分析功能
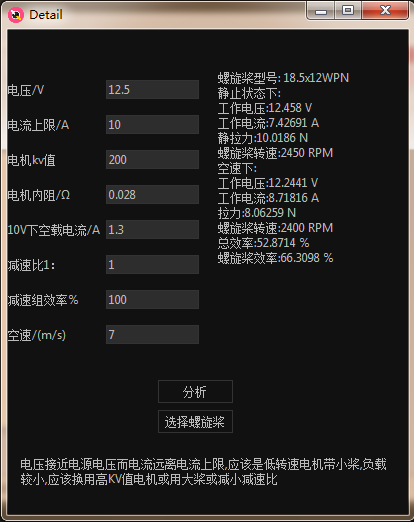
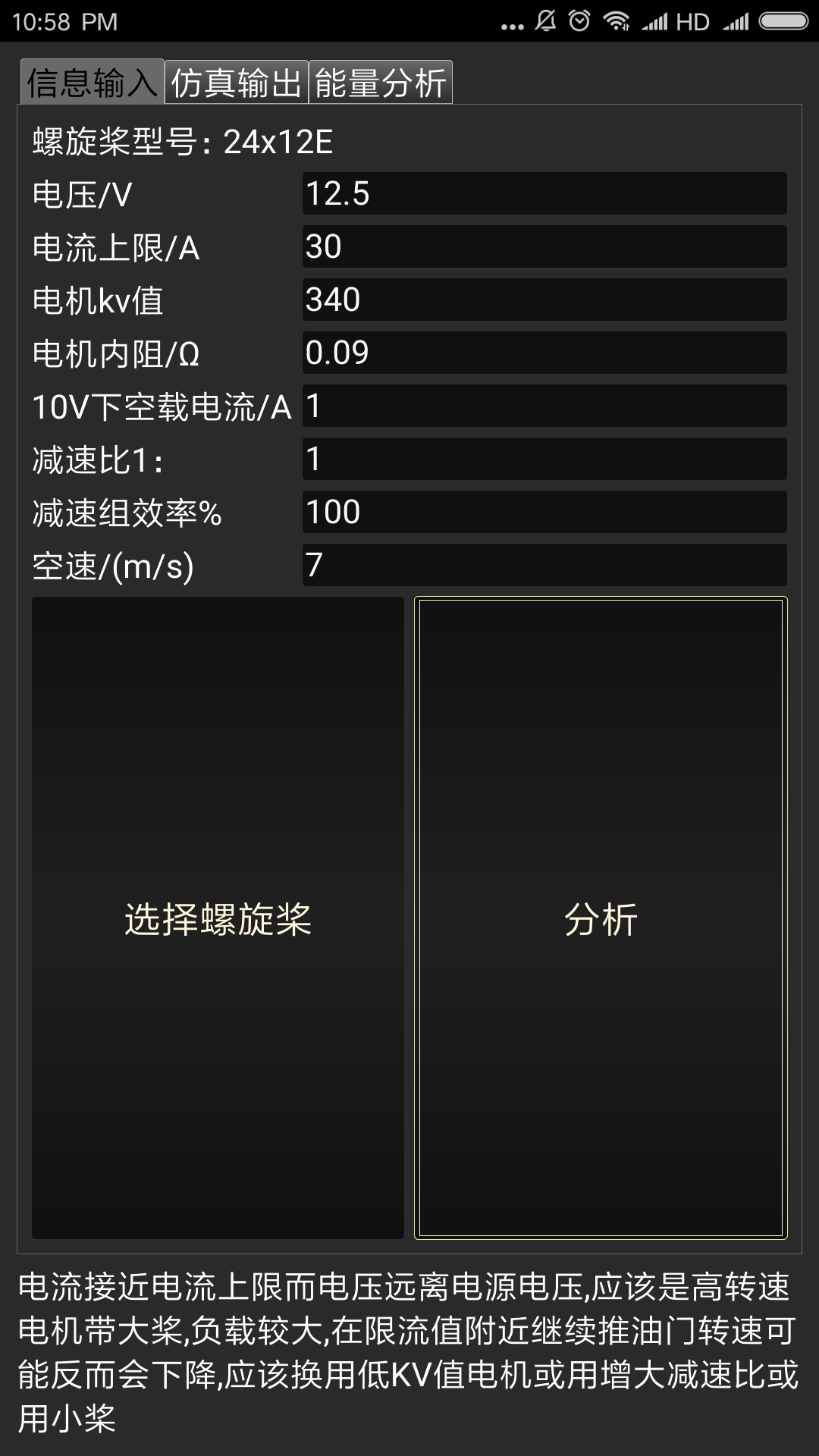
DemoProp能够对具体的电动系统选配提出指导意见,可以判断当前电机、电源、螺旋桨、减速组的组合究竟是轻载、超载还是正常载荷,如下图所示。
图表功能
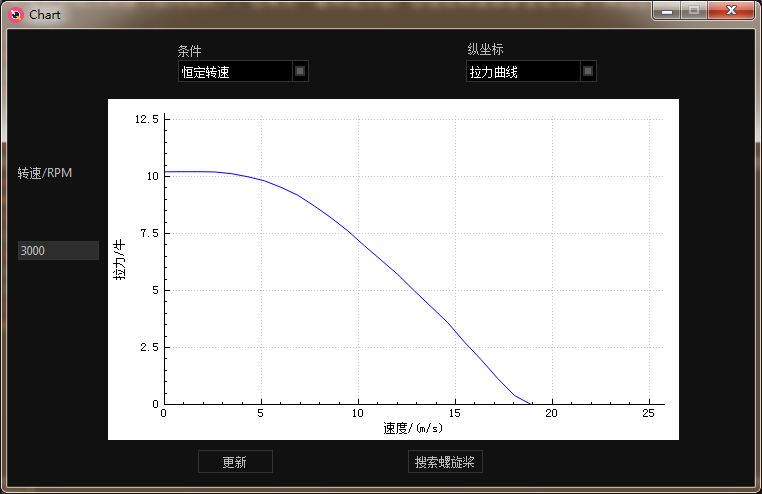
PropChart能够绘制螺旋桨的拉力曲线、效率曲线等等,这里我用的是QCustomPlot进行绘制,如下图所示。
移动版
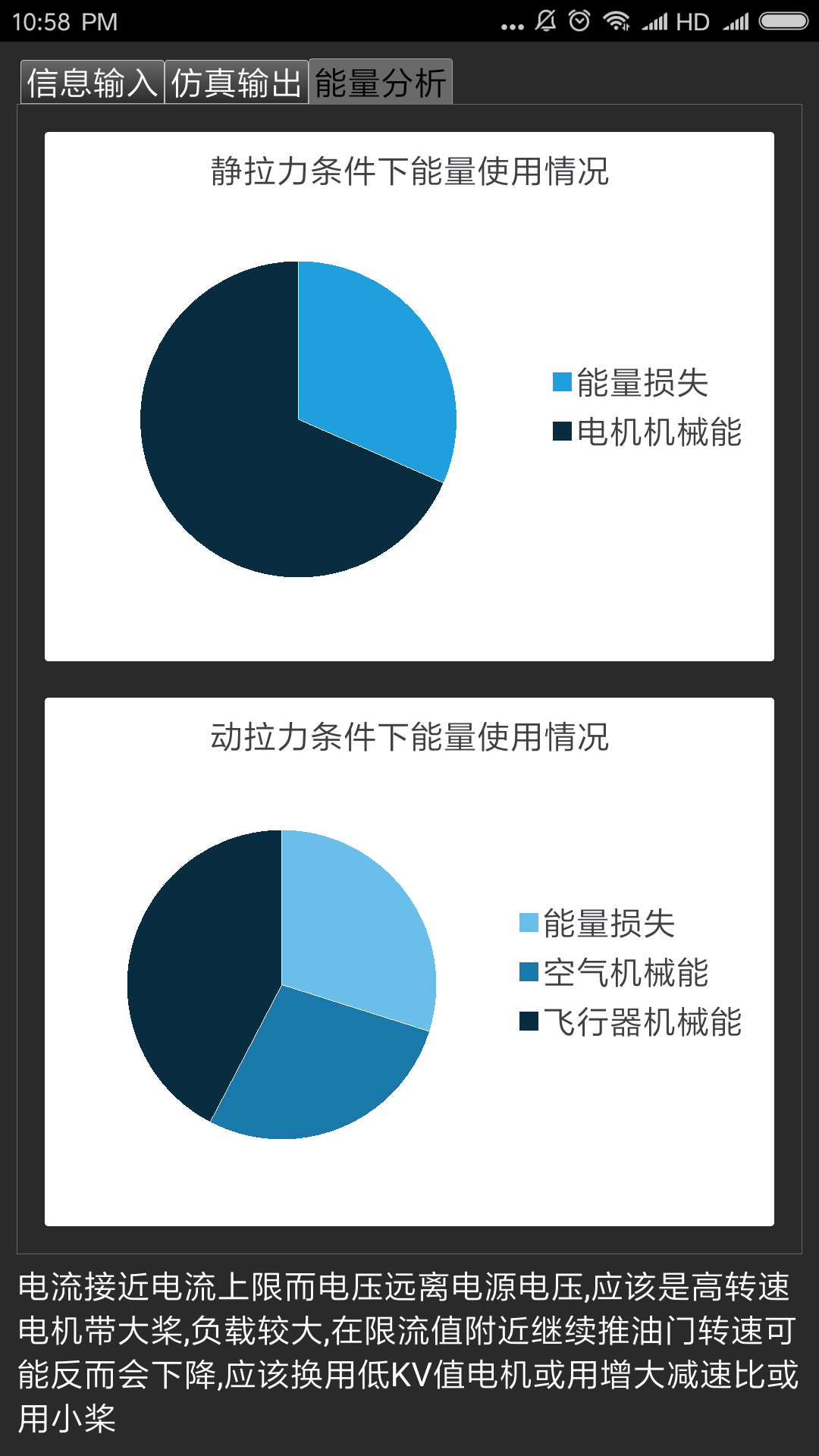
一直苦于在室外进行动力试验的时候,不方便将测量的数据与仿真数据进行校对、不知道动力系统应该怎么调整。感谢伟大的Qt的跨平台特性,让我能够将程序移植到安卓系统上(实际上移植到iOS上也可以,不过就是我没有苹果电脑与手机),极大地方便了在外场的实验。针对手机的一些特点,在功能上进行了一些改进,例如取消筛选功能,并增加绘制能量分析饼图的功能。手机版的交互体验应该比电脑版的好太多了。截图如下:

数据验证
静拉力实测数据验证
测试仿APC12X6E螺旋桨,飓风2820电机,$K_v=920$ ,内阻28mOhm,静拉力1.7千克力,电流47-48安,转速8300RPM。仿真结果为静拉力2.3千克力,转速8830RPM。考虑到APC官网的数据本来比实际值偏高(参考文献的风洞实验数据有验证),误差与使用偏高值以及没有使用正品APC螺旋桨有关。
应用于太阳能飞机动力系统的例子
某翼展为5米的太阳能无人机,没有储能装置,太阳能提供动力系统的所有能量。机翼上的电池片大约提供110瓦电能。实验测试测得电池片能够提供的电压大约不超过13V,电流不超过8A。最早使用KV值1000的电机驱动20英寸的自制螺旋桨,静拉力输出很难超过1千克力。换用340KV电机带20英寸以上的木桨,静拉力能够超过10千克力。经计算表明,电机KV值在200附近时驱动20$\sim$22英寸螺旋桨能够有更高效率,换用200KV螺旋桨,以及APC22X10E的螺旋桨,静拉力为1.35千克力。
存在的问题
- 筛选功能卡在IO上比较耗时间。当然,MSVC编译的程序能够明显快于MINGW编译的程序。解决方法有很多,只是我不想去重构了
- 电脑版的交互体验非常差
- 电脑版没有对UI进行多分辨率的调整