实现了一个卫星姿态动力学的仿真程序,包括动力学的仿真以及3维显示。
本文公式较多,在浏览器中将会花较长时间用于渲染公式。
这篇文章参考了不少叶劲峰(Milo Yip)大神翻译的经典著作《游戏引擎架构》,以及SimTK引擎的文档。
常见算法
刚体动力学问题里面最容易遇到的就是微分方程,数值求解微分方程最经典的方法莫过于欧拉法和RK4方法,这里就不多说了。不过,游戏引擎里还经常有一种算法:韦尔莱积分(Verlet intergration)。
韦尔莱积分
推导如下:
这里速度就被消去了。
还有一种速度韦尔莱:
- $r(t_1+\Delta t)=r(t_1)+v(t_1)\Delta t+\frac{1}{2}a(t_1)\Delta t^2$
- $v(t_1+\frac{1}{2}\Delta t)=v(t_1) + \frac{1}{2}a(t_1)\Delta t$
- $a(t_1+\Delta t) = m^{-1}F(t_2,r(t_2),v(t_2))$
- $v(t_1+\Delta t) = r(t_1+\frac{1}{2}\Delta t) + \frac{1}{2}a(t_1+\Delta t)\Delta t$
这个第三步实际上也用的是近似值,我感觉和CFD中的麦考马克法有些类似。虽然这里是速度,位移,但是同样适用于角度,角速度的情况。
龙格库塔算法
韦尔莱积分具有兼顾速度和精度的特点,因此在游戏引擎中得到了大量运用。但是如果对于需要精确预测的问题,或许还是需要龙格库塔算法。经典龙格库塔法我就不写了,这里写一下更一般的龙格库塔方法。
令初值问题表述如下。
那么
其中
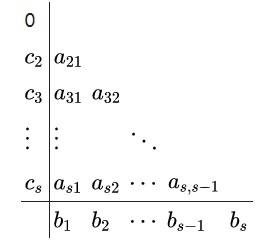
要给定一个特定的方法,必须提供整数$s$(级数),以及系数 $a_{ij}$(对于1 ≤ $j < i$ ≤ s),$b_i$(对于$i = 1, 2, …, s$)和$c_i$(对于$i = 2, 3, …, s$)。这些数据通常排列在一个助记工具中,称为Butcher tableau(得名自John C. Butcher):
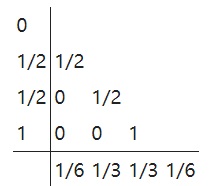
 例如,RK4法可以表示为
例如,RK4法可以表示为
欧拉法可以表示为:
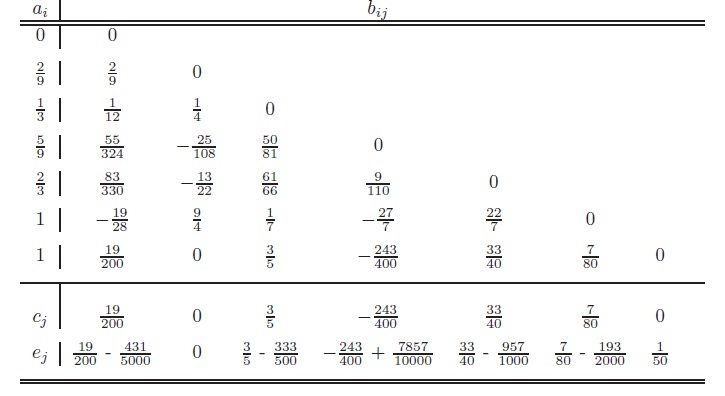
 而下面给出的是Prince-Dormand 45系数:
而下面给出的是Prince-Dormand 45系数:
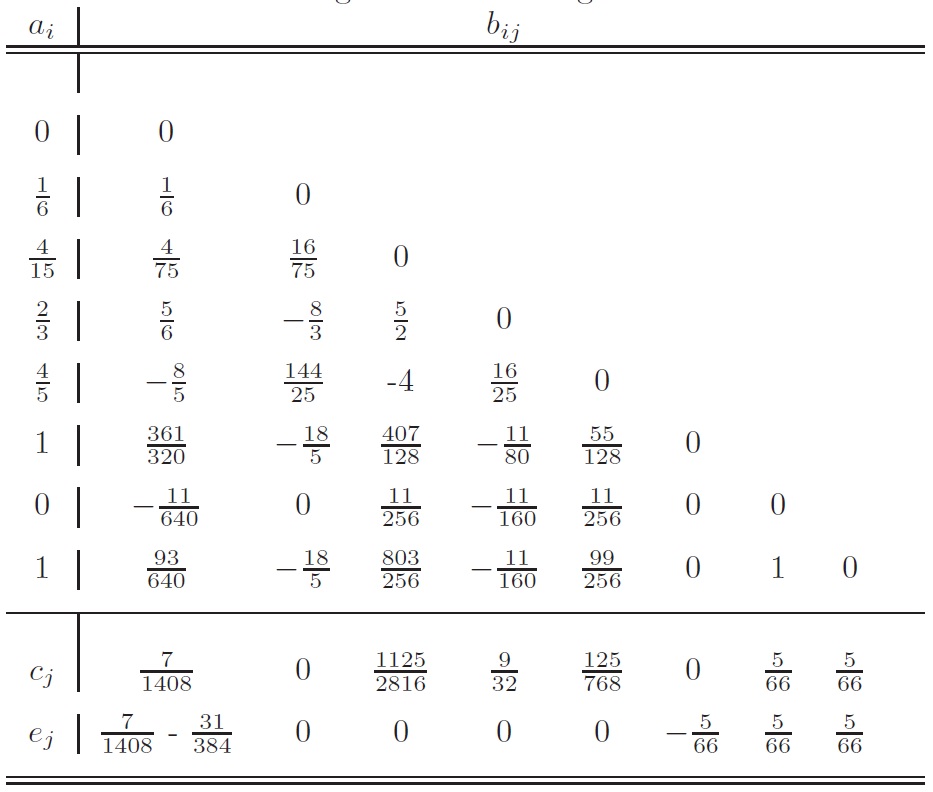
 Runge-Kutta-Fehlberg 56系数:
Runge-Kutta-Fehlberg 56系数:
四元数
\begin{equation} q = [\mathbf{q}_v\quad q_s]=[\mathbf{a}\sin\frac{\theta}{2}\quad\cos\frac{\theta}{2}] \end{equation} 其中:
- $\mathbf{a}$是旋转轴,模长单位化
- $\frac{\theta}{2}$是旋转半角
四元数的共轭四元数是 \begin{equation} q^{*}=[-\mathbf{q}_v\quad q_s] \end{equation} 容易证明,当$|q|=1$时,$q^{-1}=q^{*}$
四元数表示向量的旋转:例如将向量$\mathbf{v}$写成四元数$v=[\mathbf{v}\quad 0]=[v_x\quad v_y\quad v_z 0]$,则有 \begin{equation} v^{\prime}=rotate(q,\mathbf{v}) = qvq^{-1} \end{equation} 对于刚体,在刚体坐标系下取例如$\mathbf{F_M}=[0\quad 0\quad 1]$,则在惯性系中,
刚体的姿态动力学方程及求解算法
就算一个刚体在没有外力的情况下旋转,在三维旋转动力学中,其角速度矢量$\mathbf{\omega}$可能并不是常亮,转轴会不停地改变方向。以长方体为例,其绕最短或最长轴旋转时,能产生均角速度矢量,而以中间长度的轴旋转,$\mathbf{\omega}$的方向就会改变。
刚体的角动量守恒
\begin{equation}
\mathbf{L}=\mathbf{I\omega(t)}
\end{equation}
而$\mathbf{\omega}$不守恒。
三维旋转不能直接求解$\mathbf{\omega}$,而应该按照如下方式求解:
\begin{equation}
\mathbf{\dot L}(t)=\mathbf{N}(t)
\end{equation}
\begin{equation}
\mathbf{\omega}(t)=\mathbf{I^{-1}L}(t)
\end{equation}
下面两个方程是四元数的方程:
\begin{equation}
\omega(t)=[\omega_x\quad \omega_y\quad \omega_z\quad 0]
\end{equation}
\begin{equation}
\frac{1}{2}\omega(t)q(t)=\dot q(t)
\end{equation}
$q$是定向四元数,表示刚体的定向,$\omega$是角速度四元数。
而惯性张量的坐标变换则是 \begin{equation} \mathbf{I^{\prime}=AIA^T} \end{equation}
齐次坐标
如果定义齐次坐标,则平移运算也可以转化为旋转运算:$\mathbf{r}=[r_x\quad r_y\quad r_z\quad 1]$,若在$\mathbf{r}$向量上平移$\mathbf{s}$,则可以表示为
别的观点
一个刚体的质量特性包括刚体的质量$m$,质心的位置向量$\mathbf{p}$,以及惯性张量$\mathbf{I}$或者$\mathbf{J}$.如果定义回转张量$\mathbf{G}$满足$\mathbf{J}=m\mathbf{G}$,那么一个刚体的特性可以被如下的$6\times6$矩阵描述: 类似的,定义关于质心的空间速度矢量$V^C=\begin{bmatrix}\mathbf{\omega}\ \mathbf{V_C}\end{bmatrix}$,就可以类似的定义动量$P^C=M^CV^C$和动能$KE=\frac{1}{2}V^TMV$ 这样定义以后,关于空间坐标转换有一些好的性质,不过这些公式较为复杂,MathJax的渲染能力有限,我就不写在这里了。具体可以参见SimTK的文档。
编写程序
对于姿态动力学问题,还是需要求解微分方程,需要用到龙格库塔算法。
定义一个简单的,但以后还可以扩展的刚体类
class rigidBody {
public:
rigidBody();
rigidBody(double Ix, double Iy, double Iz, mat33 &cosineMat, vec3 &omega,
std::function<vec3(vec3 &, mat33 &, double)> mome)
: m_Ix(Ix), m_Iy(Iy), m_Iz(Iz), m_inertia(mat33::fromDiag(Ix, Iy, Iz)),
m_cosMat(cosineMat), m_omega(omega), m_time(.0), moment(mome) {}
~rigidBody() {}
void do_step(double dt); // calculate the state after time dt
double getRotKineticEnergy();
vec3 getAngularMomentum(); // expressed in the inertial frame
vec3 getOmega(); // expressed in the inertial frame
mat33 getInertiaTensor(); // expressed in the inertial frame
mat33 getCosineMat();
private:
// double m_mass;
double m_Ix, m_Iy, m_Iz;
mat33 m_inertia; // expressed in the body frame
mat33 m_cosMat;
// vec3 m_pos;
vec3 m_omega; // expressed in the body frame
// vec3 m_speed;
double m_time;
std::function<vec3(vec3 &, mat33 &, double)> moment;
// suppose M=M(omega,cosineMatrix,t), expressed in the body frame
// vec3 force(parameters);
void func(double t, vec3 &omega, mat33 &cosMat, vec3 &resVec,
mat33 &resMat);
// get the diff format of the moment dynamics
};
代码中都有具体的注释解释。我实现的动力学的时间步进代码如下:
void rigidBody::func(double t, vec3 &vec, mat33 &cosMat, vec3 &resVec,
mat33 &resMat) {
vec3 M = moment(vec, cosMat, t);
double dwx =
M.getX() / m_Ix + vec.getY() * vec.getZ() / m_Ix * (m_Iz - m_Iy);
double dwy =
M.getY() / m_Iy + vec.getX() * vec.getZ() / m_Iy * (m_Ix - m_Iz);
double dwz =
M.getZ() / m_Iz + vec.getX() * vec.getY() / m_Iz * (m_Iy - m_Ix);
resVec = vec3(dwx, dwy, dwz);
resMat = crossProductMat3(vec) * cosMat;
}
void rigidBody::do_step(double dt) {
// using RK4 algorithm
static vec3 vk1, vk2, vk3, vk4;
static mat33 mk1, mk2, mk3, mk4;
static vec3 resV;
static mat33 resM;
double t = m_time;
func(t, m_omega, m_cosMat, vk1, mk1);
mk1 *= dt;
vk1 *= dt;
resV = m_omega + .5 * vk1;
resM = m_cosMat + .5 * mk1;
func(t + .5 * dt, resV, resM, vk2, mk2);
mk2 *= dt;
vk2 *= dt;
resV = m_omega + .5 * vk2;
resM = m_cosMat + .5 * mk2;
func(t + .5 * dt, resV, resM, vk3, mk3);
mk3 *= dt;
vk3 *= dt;
resV = m_omega + vk3;
resM = m_cosMat + mk3;
func(t + dt, resV, resM, vk4, mk4);
mk4 *= dt;
vk4 *= dt;
m_time += dt;
m_omega += (.16666666666666666666666666666666666666666666666666666666666 *
(vk1 + 2.0 * vk2 + 2.0 * vk3 + vk4));
m_cosMat += (.16666666666666666666666666666666666666666666666666666666666 *
(mk1 + 2.0 * mk2 + 2.0 * mk3 + mk4));
}
然后需要绘制3维的动画,这一点也很麻烦。首先需要写一个sceneModifier来显示三维模型:
SceneModifier::SceneModifier(Qt3DCore::QEntity *rootEntity)
: m_rootEntity(rootEntity) {
// Cylinder shape data
Qt3DExtras::QCylinderMesh *cylinder = new Qt3DExtras::QCylinderMesh();
cylinder->setRadius(1);
cylinder->setLength(3);
cylinder->setRings(100);
cylinder->setSlices(20);
// CylinderMesh Transform
Qt3DCore::QTransform *cylinderTransform = new Qt3DCore::QTransform();
cylinderTransform->setScale(1.5f);
cylinderTransform->setRotation(
QQuaternion::fromAxisAndAngle(QVector3D(1.0f, 0.0f, 0.0f), 20.0f));
cylinderTransform->setTranslation(QVector3D(-5.0f, 4.0f, -1.5));
Qt3DExtras::QPhongMaterial *cylinderMaterial =
new Qt3DExtras::QPhongMaterial();
cylinderMaterial->setDiffuse(QColor(QRgb(0x928327)));
// Cylinder
m_satEntity = new Qt3DCore::QEntity(m_rootEntity);
m_satEntity->addComponent(cylinder);
m_satEntity->addComponent(cylinderMaterial);
m_satEntity->addComponent(cylinderTransform);
}
这个例子是从Qt3D的一个example改过来的,Qt3D可以让我们更加方便地绘制3D模型。具体的调用方法很简单,其中光线、材质渲染与这里讨论的主题关系不大,可以不用管。主要是需要对动画涉及的刚体的transform需要制作动画。
void SceneModifier::setSome(int type) {
delete m_satEntity;
m_satEntity = new Qt3DCore::QEntity(m_rootEntity);
Qt3DExtras::QPhongMaterial *satMaterial = new Qt3DExtras::QPhongMaterial();
satMaterial->setDiffuse(QColor(QRgb(0x928327)));
// satMesh Transform
Qt3DCore::QTransform *satTransform = new Qt3DCore::QTransform();
satTransform->setScale(1.5f);
satTransform->setTranslation(QVector3D(-5.0f, 4.0f, -1.5));
TransformController *ctrl = new TransformController(satTransform);
ctrl->setType(type);
ctrl->setTarget(satTransform);
ctrl->setTime(.0f);
QPropertyAnimation *animation = new QPropertyAnimation(satTransform);
animation->setTargetObject(ctrl);
animation->setPropertyName("time");
animation->setDuration(100000);
animation->setStartValue(QVariant::fromValue(.0));
animation->setEndValue(QVariant::fromValue(800000000));
animation->setLoopCount(1);
animation->start();
// sat
m_satEntity->addComponent(satTransform);
m_satEntity->addComponent(satMaterial);
}
因此我们需要定义一个TransformController的类:
class TransformController : public QObject {
Q_OBJECT
Q_PROPERTY(Qt3DCore::QTransform *target READ target WRITE setTarget NOTIFY
targetChanged)
Q_PROPERTY(float time READ time WRITE setTime NOTIFY timeChanged)
public:
TransformController(QObject *parent = 0);
void setTarget(Qt3DCore::QTransform *target);
Qt3DCore::QTransform *target() const;
void setTime(float time);
float time() const;
signals:
void targetChanged();
void timeChanged();
protected:
void updateQuat();
private:
Qt3DCore::QTransform *m_target;
QQuaternion m_quat;
float m_time;
float dt;
rigidBody m_body;
/*mat33 tensor;
vec3 omega;
vec3 angularM;
mat33 cosineMat;*/
};
TransformController中比较关键的几个代码如下:
void TransformController::setTarget(Qt3DCore::QTransform *target) {
if (m_target != target) {
m_target = target;
emit targetChanged();
}
}
Qt3DCore::QTransform *TransformController::target() const { return m_target; }
void TransformController::setTime(float time) {
if (!qFuzzyCompare(time, m_time)) {
dt = (time - m_time) / 12000000.0; // 1000.0;
// dt=.01;
m_time = time;
updateQuat();
emit timeChanged();
}
}
float TransformController::time() const { return m_time; }
void TransformController::updateQuat() {
m_body.do_step(dt);
m_quat = fromMat33(m_body.getCosineMat());
m_target->setRotation(m_quat);
static vec3 am, omega, z_;
static vec3 z(.0, 1.0, .0);
z_ = m_body.getCosineMat().transpose() * z;
// express the vector in the inertial frame
am = m_body.getAngularMomentum();
// omega=m_body.getOmega();
omega = m_body.m_omega;
double T = m_body.getRotKineticEnergy(), theta = angle(z, z_) * degPerRad;
// theta is called the nutation angle
}
由于TransformController的类定义有这样一条语句:Q_PROPERTY(float time READ time WRITE setTime NOTIFY timeChanged),因此如果时间变化,就会调用setTime函数,setTime函数会调用updateQuat函数,在updateQuat函数中进行动力学的时间步进求解,而m_target就保存的是刚体的旋转四元数信息,更新之后就会用新的旋转四元数渲染三维模型。